

 专用传感器和采集仪
专用传感器和采集仪  模型箱及制样系统
模型箱及制样系统  试验配套设备
试验配套设备  全表面场非接触式变形测量单元
全表面场非接触式变形测量单元  土工常用试验设备
土工常用试验设备  室内岩石试验设备
室内岩石试验设备  粗粒土试验设备
粗粒土试验设备  其他试验设备
其他试验设备  原位测试设备
原位测试设备  工程勘察设备
工程勘察设备  工程钻机
工程钻机 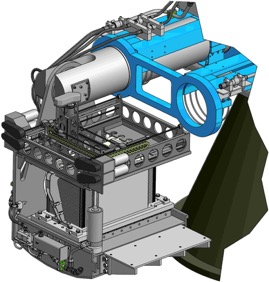
借助机械手,可在离心机高速旋转、模型处于高重力场应力状态的工况下,对试验模型开展精准且可控的操作,以此模拟现实场景中各类动态施工过程或地质活动。
离心机机械手主要功能包括:模型制备与操作、传感器布设与校准、动态模拟、实时监测与数据采集、样品取样与测试。
机械手驱动机构能够控制两个水平方向(x轴和,y轴)和竖直方向(z轴)的运动及在水平面的转动(θ轴)。机器人沿四轴方向的运动均由直流伺服电机驱动。

主要特点
高精度与高刚度:采用碳纤维、钛合金、高强度铝合金等高强度轻量化材料,结合优化的桁架结构形式,可最大限度提升整体刚度、减轻设备自重,进而有效降低运行过程中的结构变形量。
紧凑型多关节构型:采用多关节设计,可以在狭小空间内实现最大的工作空间和灵活性。
高精度驱动与控制系统:驱动方式:标配电伺服驱动系统,具备控制精准、响应迅速的核心优势,可按需选配液压驱动方案。
控制系统:搭载实时控制系统,能够主动补偿离心力场引发的动态干扰,确保机械手运动轨迹的精确性。
稳定的信号与动力传输:通过滑环组件实现旋转部件与静止部件间的信号及动力传输,可稳定传递电信号、电力乃至光纤信号,保障通信与供电的连续不间断。
专用的末端执行器(手爪):机械手末端执行器(手爪)支持按需定制,适配不同试验场景,可选类型包括但不限于:标准夹爪、触探仪、微型挖斗/铲子、加载压头、摄像头云台等。

 客服QQ
客服QQ